
[DSP 03] Convolution Sum
이전 내용 복습
$ x(n) ~ \rightarrow ~ LTI ~ system ~ \rightarrow ~ y(n) $
$ output: ~ y_h(n) + y_p(n) + ICs $
Convolution sum
$ y(n) = x(n) * h(n) $
LTI system with impulse response : $h[n]$
출력은 입력과 임펄스 응답의 convolution sum
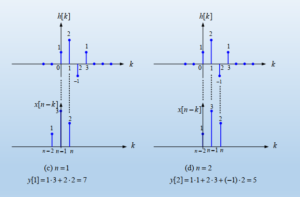
$y[n] = x[n]*h[n] = \sum\limits_{k=-\infty}^{\infty}x[k]h[n-k] $
Convolution sum의 성질
교환성: $ x[n]*h[n]=h[n]*h[x] $
Convolution sum 증명
$ y(n) = x(n) * h(n) = \sum\limits_{k=-\infty}^{\infty} x(k)h(n-k) $
$y(n) = T[x(n)] $
— 여기서 T는 transformation(LTI)을 의미
$ {x(n)} = {\cdots, x(-1), x(0), x(1), \cdots} $
delta function의 성질을 이용한다면
$ x(n) = \cdots + x(-1)\delta(n+1) + x(0)\delta(n) + \cdots + x(k)\delta(n-k) + \cdots $
로 표현 가능
$ y(n) = T[x(n)] = \cdots + T[x(k)\delta(n-k)] + \cdots = \cdots + x(k)T[\delta(n-k)] + \cdots $
여기서 $ T[x(n)] = T[\delta(n)] = h(n) $ 이므로
$ = \cdots + x(k)h(n-k) + \cdots
= \sum\limits_{k=-infty}^{\infty} x(k)h(n-k) $
Causality of LTI system
Causality
$ h[n] = 0 ~ for~ n < 0 $
Convolution sum of causal LTI system
$ y[n] = \sum\limits_{k=-infty}^{n} x[k]h[n-k] $
$ ~~ = \sum\limits_{k=0}^{\infty} x[n-k]h[k] $
만약 $ k < 0 $ 이면 무조건 $ h(k) = 0 $ 이므로, 즉 causal input 이라면
$ \sum\limits_{k=0}^{n} h(k) x(n-k) $
Stability of LTI system
LTI system이 BIBO stable할 필요 충분 조건
$ \sum\limits_{n=-\infty}^{\infty} |h[n]| < \infty $
즉, abosolute sum이 존재한다면 BIBO stable