
[DSP 02] DT System
1. DT System
1) DT System의 개념
$ x[n] \rightarrow T(*) \rightarrow y[n] $
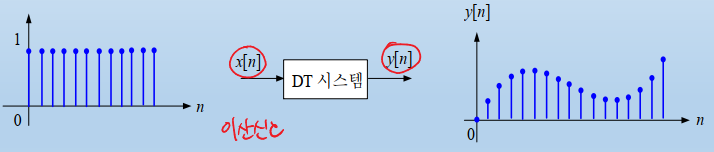
$ h[n] $ : impulse-response (입력-출력 관계로 유추 가능, System을 대변)
DT System의 예
복리 원리 계산
$ y[n] = (1+r)y[n-1] + x[n] $
$ \Longleftrightarrow y[n] – ay[n-1] = x[n], ~~ (a=1+r) $
일년 평균 계산
$ y[n] = \frac{1}{12} \sum_{k=0}^{11}x[n-k] $
$ \Longleftrightarrow y[n] = \sum_{k=0}^{11} b_k x[n-k] $
cf. Differential Eq. vs Difference Eq.
Differential Eq. 미분방정식 $ y(t) + ay`(t) = x(t) $
Difference Eq.(DE) 차분방정식 $ y[n] + ay[n-1] = x[n] $
2) DT System의 유형 분류
(1) Linear System
Linear system 선형조합
$ T\{\alpha x_1[n] + \beta x_2[n] \} = \alpha T\{ x_1[n] \} + \beta T \{x_2[n] \} = \alpha y_1[n] + \beta y_2[n] $
- DE의 coef.들이 LCC(Linear constant coef.)이면 linear하다.
(2) Time Invariant System (TI)
Time invariant: 시간이 지나도 변하지 않는다.
$ T\{x[n-n_0]\} = y[n-n_0] $
example
(a) $ y[n] = 0.5 x[n] $ TI
(b) $ y[n] = nx[n] +x[n-1] $ TV $ n $ 이 변하기 때문
(c) $ y[n] – (0.8)^n y[n-1] = 2x[n] $ TV
(3) Causal System
입력에 의해서만 출력이 결정된다는 의미. 땅에 발을 구르기 전에는 발 구르는 소리가 나지 않는다. 하지만 인간이라면(Non-causal) 발을 구르기 전 발 구르는 소리가 날 것이라고 예측하며 미리 움찔한다.
$ (1) x[n] = 0 \forall n \leq n_0 $ 이면 $ y[n]=0 ~~ \forall n \leq n_0 $
$ h[n] = 0 for n<0 $
example
(a) $ y[n] = 3x[n] + 1 $ causal
(b) $ y[n] = 3x[n+1] $ non-causal
(c) $ y[n] = \sum_{k=-\infty}^{\infty} (0.2)^k x[n-k] $ non-causal
(4) BIBO Stable System
BIBO란 Bounded input bounded output 을 뜻한다. 경계가 정해진 System을 말한다. 예를 들어 굉장히 큰 태풍은 우리가 가정할 수 있는 상황에서 제외한다. 바람에 흔들리는 다리를 건설함에 있어 어느 정도의(측량할 수 있을 정도의) 바람을 염두에 두고 건설한다. 한계를 정해놓은 System이다.
$ |x[n]| \leq B_x < \infty $이면, $ |y[n]| \leq B_y < \infty for all n $
Conclusion
쉽게 이야기해서 Linear, TI, Causal, BIBO System이 가장 중요하고 많이 다루어진다.
2. DT System in Time Domain
1) 차분방정식(Difference Equation, DE)
DT LTI System은 DE로 표현된다.
$ \sum_{k=0}^{N}{ak} = \sum{k=0}^{N}{b_k x[n-k]} , (n \geq 0) $
$ y[-1] = y_1, ~y[-2] = y_2, \cdots, y[-N] = y_N ~~~ initial ~~ condition $
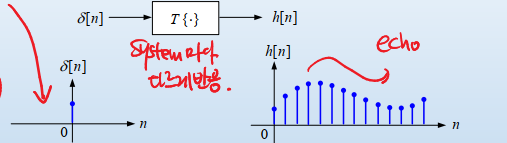
2) Impulse Response
$ h[n] = T\{\delta[n]\} $
- FIR : Finite-duration Impulse Response
- IIR : Infinite-duration Impulse Response
Output by the impulse response
$ y[n] = x[n]*h[n] = \sum_{k=-\infty}^{\infty}x[k]h[n-k] $ convolution sum
3. 균일해, 특수해를 통한 일반해 구하기
균일해와 특수해의 합으로 일반해를 구할 수 있다.
1) 균일해(homogenous solution) $ y_h[n] $
$ let~~ x = 0 $
$ \sum_{k=0}^{N} a_ky_h[n-k] = 0 $
Trial homogenous solution
$ y_h[n] = \alpha^n $
Characteristic equation
$ \sum_{k=0}^{N} a_k \alpha^{-k} = 0 $
2) 특수해(particular solution) $ y_p[n] $
초기조건을 제외한 방정식의 해 $ \sum_{k=0}^N a_kyp[n-k] = \sum{k=0}^M b_kx[n-k] $
입력신호 형태 별 trial 특수해 형태
| 입력 신호 형태 | 특수해의 형태 |
|---|---|
| $ 1 $ | $ A $ |
| $ n $ | $ An + B $ |
| $ n^2 $ | $ An^2 + Bn + C $ |
| $ \beta^2 $ | $ A\beta^n $ |
| $ cos (n) ~ or ~ sin (n) $ | $ Acos (n) + B sin (n) $ |
Question 01
$ y[n] – 0.2y[n-1] = x[n] $
$ y[-1] = -1 $ : initial condition ~ (stored energy)
균일해
$ let ~ y[n] = \alpha^n $
$ \alpha^n – 0.2 \alpha^{n-1} = 0 $
$ \alpha = 0.2 $
$ y_h[n] = C*0.2^n $ (미지수 이용)
특수해
$ let~y_p(n) = A[n] $ > 1차 trial
특수해를 구할 때는 시간이 충분히 흘렀을 때를 가정
$ A – 0.2A = 0 $
$ A = 0 ~ (\delta[n]=0 ~ if~n \neq 0 $
$ y_h[n] = C(0.2)^n $
$ y_p[n] = 0 $
일반해
이제 initial condition 고려 * $ (n=0) $
$ y[0] – 0.2 y[-1] = 1 $
$ y[0] = 0.8 $
$ y[n] = C(0.2)^n $ 이므로 $ c=0.8 $
$ y[n] = 0.8(-0.2)^n $
Question 02
$ y[n] – \frac56 y[n-1] + \frac16 y[n-2] = x[n] $
$ y[-1] = 1, ~ y[-2] = 0 $
균일해
$ \alpha^n – \frac56 \alpha^{n-1} + \frac16 \alpha^{n-2} = 0 $
$ \alpha = \frac12, \frac13 $
$ y_h[n] = c_1 (\frac12)^n + c_2 (\frac13)^n $
특수해
$ x[n]=1, n \geq 0 $
$y_p[n]-\frac56y_p[n-1]+\frac16y_p[n-2]=1$
$Let~y_p(n)=A, ~then~A-\frac56 A+\frac16 A = 1 $
$ \therefore y_p[n]=3 $
일반해
$ y[n] = y_h[n] + y_p[n] + ~initial~condition $
$ y_h[n] = c_1(\frac12)^n + c_2 (\frac13)^n$
$ y_p[n] = 3 ~ (n\geq 2) $
$ \therefore ~ y[n] = c_1(\frac12)^n + c_2 (\frac13)^n + 3 $
단, 위의 식은 $ n \geq 2 $ 일때만 만족하므로 초기조건을 바로 이용할 수 없다.
원식을 통해서 $ y(0) $을 구해준 후 대입
Question 03
$ y(n) – \frac56 y(n-1) + \frac 16 y(n-2) = \delta(n) $
Solution 03
$ h(n) = c_1 (\frac12)^n + c_2 (\frac13)^n + 0 + ICs ~ (n \geq 0) $
여기서 $h(n)$ 은 impulse response 이다. input 함수가 delta function인 경우 특수해는 무조건 0 이 된다. 또한 $ n < 0 $ 에서는 에너지가 없는 상태이므로 초기조건 $ y(-1) = 1,~y(-2) = 0 $ 을 $ h(-1) = 0, ~ h(-2) = 0 $ 라고 쓸 수 있다.
$ h(0) = \frac56 h(-1) – \frac16 h(-2) + \delta(0) = 1 $
$ h(1) = \frac56 h(0) – \frac16 h(-1) + \delta(1) = \frac56 $
$ therefore c_1=3, ~ c_2 = -2 $
$ h(n) = [3(\frac12)^n – 2(\frac12)^n]u(n) $